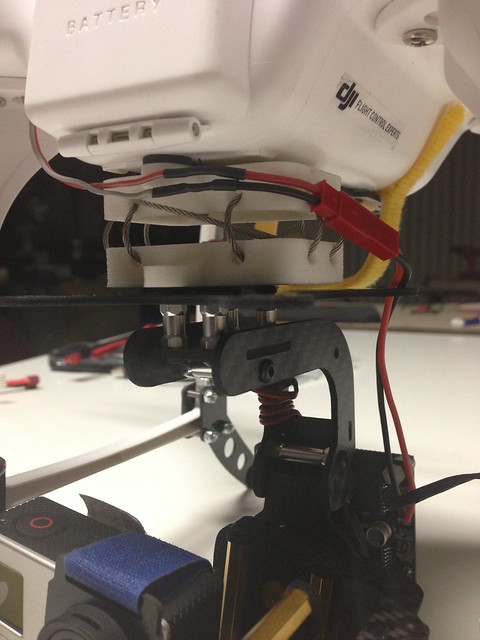
So a few weeks ago I decided to jump in on this whole brushless gimbal nonsense. I found a fairly inexpensive gimbal and thought, "hey, why not lets do this..." I purchased it from ebay under the seller Goodlucksell for under $200.
Turns out its the exact same item as this...and the same seller...
http://www.goodluckbuy.com/2-axis-gopro ... aphy-.html
It took less than 2 weeks to arrive at my house in California.

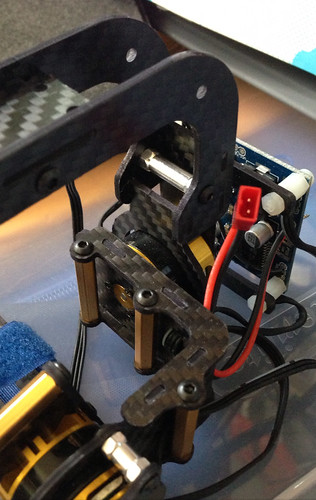
After examining it I learned it was a v3.0.1 Martinez board. It also had brushlessgimbal.de stamped on the back of the board.
Im assuming the motors are these...which are 14 pole (i opened up the motor and counted the magnets :lol: )
http://www.goodluckbuy.com/2208-brushle ... imbal.html
So I went to look up more information on this gimbal and came across http://code.google.com/p/brushless-gimbal/
I picked up firmware 048 and the GUI and tried to install the drivers for the board. Windows wanted to install some updated driver but after reading a post on another forum I learned I needed a much older driver. found here http://witespyquad.gostorego.com/brushl ... tinez.html
once I loaded those older drivers everything was good. I was able to flash the new firmware and check on the gyro, but the gyro was acting crazy...the lines were all over the place. Hours and hours went by until I read another post stating that the IMU sensor had to be mounted a specific way. This is how it was sent to me
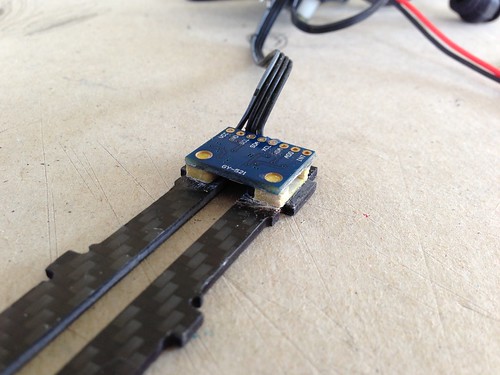
after a few minutes i had it mounted properly
I plugged everything back up and...disappointment once again. the gyro wasnt acting crazy anymore but it seemed the motors had no life in them, there was power getting to it (3S 11.1v 450mah lipo) but it wasnt functioning properly.
For some reason when I hooked up the battery and the usb cable, then turned on the GUI, the gimbal came to life and was working on default 048 settings. So I thought I needed more juice, afterall, the Martinez board can handle a 4S 14.8v lipo. Next day I couldnt find a 4S lipo at my lhs but was suggested i run 2S 7.4v in series. I was concerned about the weight but I had no other option at that point and tried again. Nothing...same result.
Why oh why did this happen, did I blow my money on a dud. But it cant be...it works flawlessly with the battery and USB hooked up. What am I doing wrong...
Turns out I didnt leave the gimbal alone long enough...just like the Naza-M upon initialization it needed to calibrate itself.
So after plugging in the battery, I let the gimbal sit for 15 seconds before I did anything else. Now it works properly
(still had the USB connected in this clip)
http://www.youtube.com/watch?v=0C8IAATeXBs
ok next step...pitch control. I have not found much information on manual pitch control with a Martinez board. Im sure its on their forums but I cant understand German... :lol: But I came across tidbits of information. I will just give the easiest tutorial here
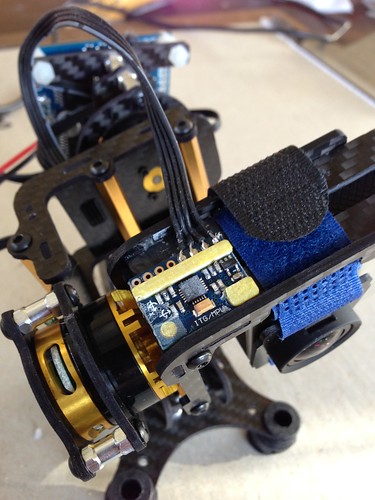
On the Martinez board locate the A1 and GND pins/hole in one of the corners. In this pic it is in the upper right hand
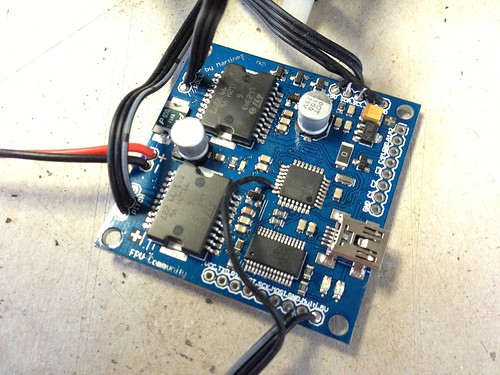
(BTW: does anybody know what the wire that is soldered in the bottom right is for? 2 wires goto those pins GND and 5V and 1 goes off to the chipset in the center...)
Solder 2 servo wires into it (I put the positive end to A1 and the negative end to GND)
hook up that newly soldered wire/servo to the F2 port on the Naza
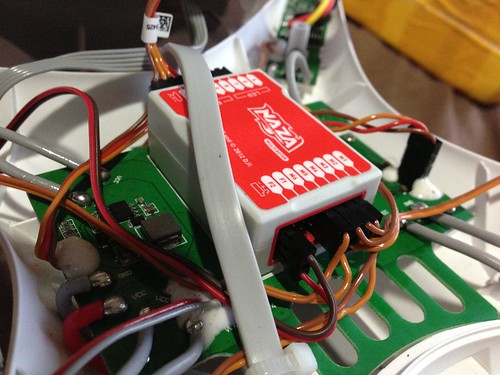
Thats all there is for the physical connections on a Martinez board to Naza. It might be the same for other controllers but this is my only brushless gimbal I've had and I have no experience on any other controllers.
Now to adjust the pitch control settings in Naza Assistant
Turn on gimbal...let it initialize and center itself
Hook up USB
Turn on Tx
Hook up battery into Phantom
screw around in Naza Assistant until the gimbal works...I went with these settings
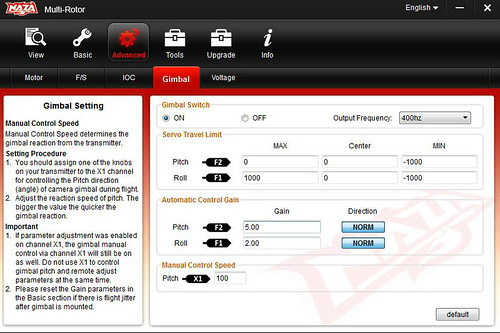
Gimbal ON
Freq 400hz
Pitch servo travel limit Max 0 Center 0 Min -1000
Pitch gain 5.00
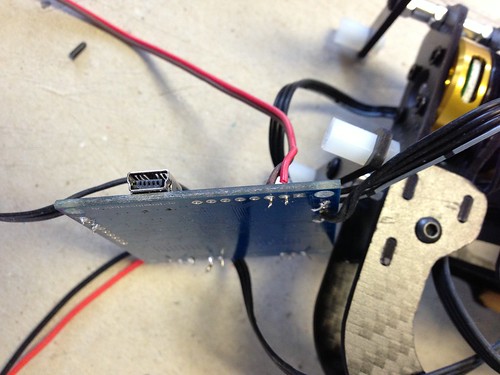
Now to test this, you need to access the 7th channel on the backside of the stock Phantom Tx.
heres a clip of the manual pitch control
http://www.youtube.com/watch?v=pMZQy0940v0
as you can see, it doesnt require much movement on the 7th channel to move the gimbal. fine tune the gain to your liking.
I am also ordering a 7th channel lever to make adjustments much easier
http://www.shapeways.com/model/1041193/ ... kit-1.html
Finally, I shot a quick video of the gimbal in action but I noticed something very worrisome. Upon hovering or descents the phantom would vibrate heavily. Now I have balanced props (using Du-Bro Tru-Spin prop balancer). I'm thinking the added weight of the gimbal + batteries smight have something to do with it. It is very dark right now so I will have to run some tests later.
basically I will remove the gimbal setup and see if the Phantom vibrates without it...then add the gimbal battery...then finally add the gimbal + battery. It might be due to a poor CG of the entire system, Im not sure...I was quick to get a sample vid of the gimbal working off of default 048 firmware settings.
http://youtu.be/5Y7Jkag3deY
its not the prettiest video and you get to see my ghetto launch pad. I forgot to mention... the gimbal sticks at least 1 inch beyond the stock landing skids... Im currently looking for another frame that will fit under (will keep the same motors/board/IMU though)
There is no post processing or stabilization in this video, its is completely raw straight from the microSD card. Phantom was in GPS mode, there was some wind going on. The gopro settings were 2.7k 30fps. It was a bit past sunset. The gimbal seems to work nicely. Left and right movements are stable and same with forward and back. The only thing bugging me is the vibration. This vibration doesnt occur when the phantom is moving but when I try to hover it appears. You can notice it in the video. If I can figure out the vibration issue Im sure the video would be very stable.
Until next time...
Turns out its the exact same item as this...and the same seller...
http://www.goodluckbuy.com/2-axis-gopro ... aphy-.html
It took less than 2 weeks to arrive at my house in California.
After examining it I learned it was a v3.0.1 Martinez board. It also had brushlessgimbal.de stamped on the back of the board.
Im assuming the motors are these...which are 14 pole (i opened up the motor and counted the magnets :lol: )
http://www.goodluckbuy.com/2208-brushle ... imbal.html
So I went to look up more information on this gimbal and came across http://code.google.com/p/brushless-gimbal/
I picked up firmware 048 and the GUI and tried to install the drivers for the board. Windows wanted to install some updated driver but after reading a post on another forum I learned I needed a much older driver. found here http://witespyquad.gostorego.com/brushl ... tinez.html
once I loaded those older drivers everything was good. I was able to flash the new firmware and check on the gyro, but the gyro was acting crazy...the lines were all over the place. Hours and hours went by until I read another post stating that the IMU sensor had to be mounted a specific way. This is how it was sent to me
after a few minutes i had it mounted properly
I plugged everything back up and...disappointment once again. the gyro wasnt acting crazy anymore but it seemed the motors had no life in them, there was power getting to it (3S 11.1v 450mah lipo) but it wasnt functioning properly.
For some reason when I hooked up the battery and the usb cable, then turned on the GUI, the gimbal came to life and was working on default 048 settings. So I thought I needed more juice, afterall, the Martinez board can handle a 4S 14.8v lipo. Next day I couldnt find a 4S lipo at my lhs but was suggested i run 2S 7.4v in series. I was concerned about the weight but I had no other option at that point and tried again. Nothing...same result.
Why oh why did this happen, did I blow my money on a dud. But it cant be...it works flawlessly with the battery and USB hooked up. What am I doing wrong...
Turns out I didnt leave the gimbal alone long enough...just like the Naza-M upon initialization it needed to calibrate itself.
So after plugging in the battery, I let the gimbal sit for 15 seconds before I did anything else. Now it works properly
(still had the USB connected in this clip)
http://www.youtube.com/watch?v=0C8IAATeXBs
ok next step...pitch control. I have not found much information on manual pitch control with a Martinez board. Im sure its on their forums but I cant understand German... :lol: But I came across tidbits of information. I will just give the easiest tutorial here
On the Martinez board locate the A1 and GND pins/hole in one of the corners. In this pic it is in the upper right hand
(BTW: does anybody know what the wire that is soldered in the bottom right is for? 2 wires goto those pins GND and 5V and 1 goes off to the chipset in the center...)
Solder 2 servo wires into it (I put the positive end to A1 and the negative end to GND)
hook up that newly soldered wire/servo to the F2 port on the Naza
Thats all there is for the physical connections on a Martinez board to Naza. It might be the same for other controllers but this is my only brushless gimbal I've had and I have no experience on any other controllers.
Now to adjust the pitch control settings in Naza Assistant
Turn on gimbal...let it initialize and center itself
Hook up USB
Turn on Tx
Hook up battery into Phantom
screw around in Naza Assistant until the gimbal works...I went with these settings
Gimbal ON
Freq 400hz
Pitch servo travel limit Max 0 Center 0 Min -1000
Pitch gain 5.00
Now to test this, you need to access the 7th channel on the backside of the stock Phantom Tx.
heres a clip of the manual pitch control
http://www.youtube.com/watch?v=pMZQy0940v0
as you can see, it doesnt require much movement on the 7th channel to move the gimbal. fine tune the gain to your liking.
I am also ordering a 7th channel lever to make adjustments much easier
http://www.shapeways.com/model/1041193/ ... kit-1.html
Finally, I shot a quick video of the gimbal in action but I noticed something very worrisome. Upon hovering or descents the phantom would vibrate heavily. Now I have balanced props (using Du-Bro Tru-Spin prop balancer). I'm thinking the added weight of the gimbal + batteries smight have something to do with it. It is very dark right now so I will have to run some tests later.
basically I will remove the gimbal setup and see if the Phantom vibrates without it...then add the gimbal battery...then finally add the gimbal + battery. It might be due to a poor CG of the entire system, Im not sure...I was quick to get a sample vid of the gimbal working off of default 048 firmware settings.
http://youtu.be/5Y7Jkag3deY
its not the prettiest video and you get to see my ghetto launch pad. I forgot to mention... the gimbal sticks at least 1 inch beyond the stock landing skids... Im currently looking for another frame that will fit under (will keep the same motors/board/IMU though)
There is no post processing or stabilization in this video, its is completely raw straight from the microSD card. Phantom was in GPS mode, there was some wind going on. The gopro settings were 2.7k 30fps. It was a bit past sunset. The gimbal seems to work nicely. Left and right movements are stable and same with forward and back. The only thing bugging me is the vibration. This vibration doesnt occur when the phantom is moving but when I try to hover it appears. You can notice it in the video. If I can figure out the vibration issue Im sure the video would be very stable.
Until next time...